
Описание на сайте Lerdge: https://www.lerdge.com/document/detail/ ... ess-Homing
Драйверы TMC2208 данный режим не поддерживают.
Режим SensorLess Homing можно использовать для осей X и Y.
Использовать этот режим для оси Z крайне не рекомендуется, так как данный режим не может обеспечить необходимую точность и повторяемость. В результате высота первого слоя будет иметь большой разброс.
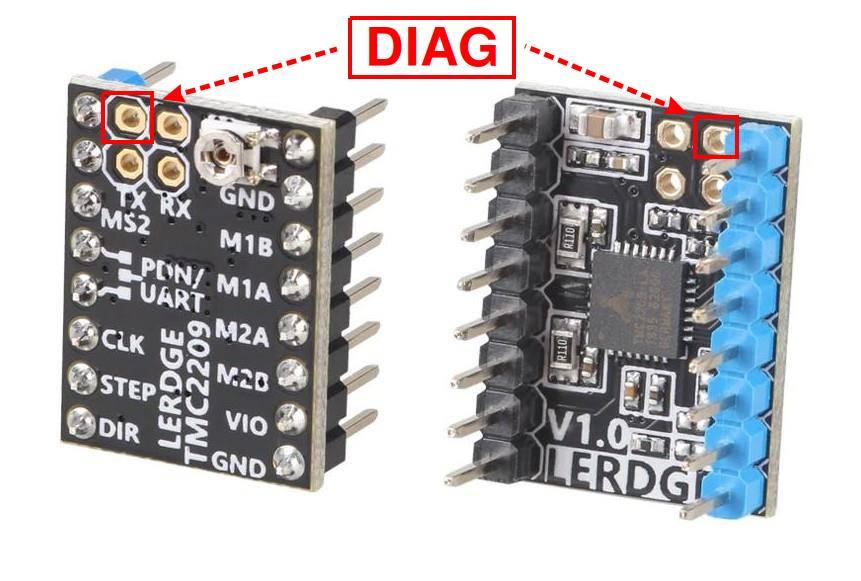
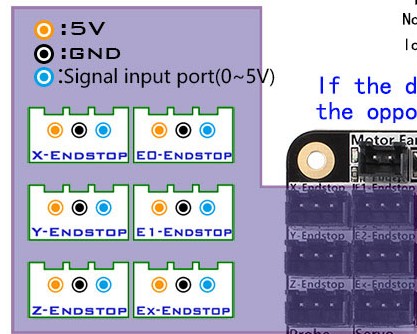
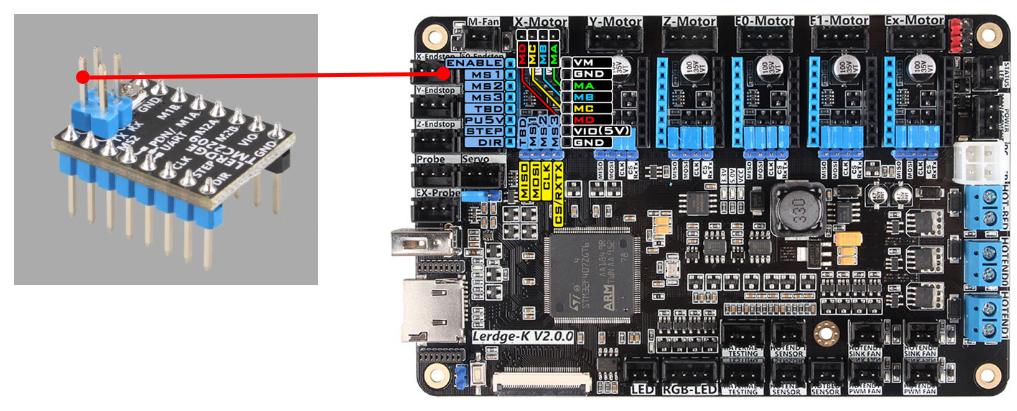
1 - Соедините проводом вывод DIAG драйвера и контакт SIG разъема концевого выключателя на плате управления.
Сигнал от драйвера об достижения крайнего положения не передаётся по UART. Поэтому требуется выполнить указанное подключение.
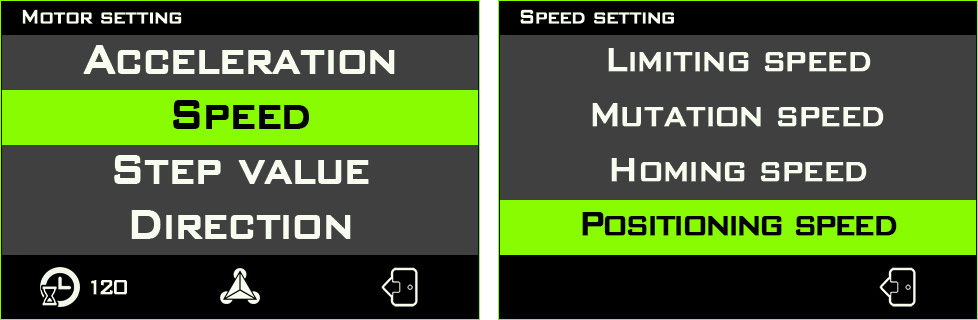
2 - Задайте скорости перемещения осей при обнуления HOMING SPEED и POSITIONING SPEED в меню MOTOR -> SPEED

Логика работы при обнулении следующая:
- Ось движется со скоростью HOMING SPEED до срабатывания концевика или получения сигнала от драйвера с вывода DIAG.
- Ось движется со скоростью POSITIONING SPEED в противоположную сторону на 5 мм.
- Ось движется со скоростью POSITIONING SPEED до срабатывания концевика или получения сигнала от драйвера с вывода DIAG.
Выбирайте скорости в пределах 10 ... 40 мм/сек. У меня получилось добиться вполне "нежного" контакта при скоростях 20 мм/сек.
HOMING SPEED = 20
POSITIONING SPEED = 20
Значения этих скоростей будут влиять на значения HOMING SENSITIVITY и POSITIONING SENSITIVITY.
- Чем выше будет задана скорость, тем больше будет значение SENSITIVITY при свободном ходе, и тем больше будет диапазон для подбора значения, но и повторяемость будет ниже.
- При низкой скорости будет меньше значение SENSITIVITY при свободном ходе и потребуется сильный удар для появления сигнала на выводе DIAG.
3 - Определите и задайте значения HOMING SENSITIVITY и POSITIONING SENSITIVITY.
Переместите оси в средние положения.
Перейдите в меню MOTOR -> TRINAMIC -> Название оси -> SENSORLESS HOMING
Запустите тесты на короткий промежуток времени, не допуская перемещения оси до крайнего положения, для определения значения SENSITIVITY при свободном перемещении.
Внимание!!! Движение не остановится даже после столкновения.
Значение HOMING SENSITIVITY задается равным примерно 90% от тестовой величины.
Чем меньше значение Вы зададите, тем сильнее будет удар. Необходимо найти компромисс, чтобы и удара не было и ложных срабатываний не происходило.

Значение SENSITIVITY будет зависеть от скорости (SPEED).
Если скорости HOMING SPEED и POSITIONING SPEED Вы задали одинаковыми, то POSITIONING SENSITIVITY и HOMING SENSITIVITY так же будут одинаковыми.
4 - Перейдите на главную страницу и выполните проверку
5 - Внесите изменения в стартовый код слайсера
При использовании режима SensorLess Homing необходимо калибровать оси по отдельности.
Так же желательно отводить ось от края после калибровки.
Использование функции GLOBAL HOMING (G28) приведёт к аварии. Стартовый код должен содержать команды:
Код: Выделить всё
G28 X
G0 X50
G28 Y
G0 Y50
G28 Z

