

Схема принтера H-bot. Концевики расположены X-max, Y-max, Z-min (BlTouch)

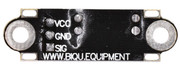
Датчики поlключены к плате SKR 1.3 в коннекторы Х+ и Y+


При подключении к концевику проводов V(+5) и GND концевик работает (при прерывании луча шторкой загорается зеленый светодиод и на сигнальном проводе концевика образуется напряжение около 5 вольт относительно GND) Но Если сигнальный провод подключить к плате в гнездо (S) То датчик прекращает реагировать на шторку! Принтер не может запарковаться! Поменял около 5 датчиков и одну плату SKR. Результат без изменений. Просил Соркина о помощи (его же проект был на его канале) но ответа не получил. Писал ему и в стриме. Оттуда послали в его телеграмм канал, но и там полный игнор. Прошу помощи у форумчан. Куда копать и что проверять. Ниже выкладываю код по датчику в Марлине.
Спойлер
/===========================================================================
//============================== Endstop Settings ===========================
//===========================================================================
// @section homing
// Specify here all the endstop connectors that are connected to any endstop or probe.
// Almost all printers will be using one per axis. Probes will use one or more of the
// extra connectors. Leave undefined any used for non-endstop and non-probe purposes.
// Укажите здесь все разъемы концевых упоров, которые подключены к любому концевому упору или датчику.
// Почти все принтеры будут использовать по одному на каждую ось. Зонды будут использовать один или несколько
// дополнительные разъемы. Оставьте неопределенным все, что используется для целей без остановки и без проверки.
//#define USE_XMIN_PLUG
//#define USE_YMIN_PLUG
#define USE_ZMIN_PLUG
#define USE_XMAX_PLUG
#define USE_YMAX_PLUG
//#define USE_ZMAX_PLUG
// Enable pullup for all endstops to prevent a floating state
#define ENDSTOPPULLUPS
#if DISABLED(ENDSTOPPULLUPS)
// Disable ENDSTOPPULLUPS to set pullups individually
//#define ENDSTOPPULLUP_XMAX
//#define ENDSTOPPULLUP_YMAX
//#define ENDSTOPPULLUP_ZMAX
//#define ENDSTOPPULLUP_XMIN
//#define ENDSTOPPULLUP_YMIN
//#define ENDSTOPPULLUP_ZMIN
//#define ENDSTOPPULLUP_ZMIN_PROBE
#endif
// Enable pulldown for all endstops to prevent a floating state
//#define ENDSTOPPULLDOWNS
#if DISABLED(ENDSTOPPULLDOWNS)
// Disable ENDSTOPPULLDOWNS to set pulldowns individually
//#define ENDSTOPPULLDOWN_XMAX
//#define ENDSTOPPULLDOWN_YMAX
//#define ENDSTOPPULLDOWN_ZMAX
//#define ENDSTOPPULLDOWN_XMIN
//#define ENDSTOPPULLDOWN_YMIN
//#define ENDSTOPPULLDOWN_ZMIN
//#define ENDSTOPPULLDOWN_ZMIN_PROBE
#endif
// Mechanical endstop with COM to ground and NC to Signal uses "false" here (most common setup).
#define X_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop.
#define Y_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop.
#define Z_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop.
#define X_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop.
#define Y_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop.
#define Z_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop.
#define Z_MIN_PROBE_ENDSTOP_INVERTING false // Set to true to invert the logic of the probe.
/**
* Stepper Drivers
*
* These settings allow Marlin to tune stepper driver timing and enable advanced options for
* stepper drivers that support them. You may also override timing options in Configuration_adv.h.
*
* A4988 is assumed for unspecified drivers.
*
* Use TMC2208/TMC2208_STANDALONE for TMC2225 drivers and TMC2209/TMC2209_STANDALONE for TMC2226 drivers.
*
* Options: A4988, A5984, DRV8825, LV8729, L6470, L6474, POWERSTEP01,
* TB6560, TB6600, TMC2100,
* TMC2130, TMC2130_STANDALONE, TMC2160, TMC2160_STANDALONE,
* TMC2208, TMC2208_STANDALONE, TMC2209, TMC2209_STANDALONE,
* TMC26X, TMC26X_STANDALONE, TMC2660, TMC2660_STANDALONE,
* TMC5130, TMC5130_STANDALONE, TMC5160, TMC5160_STANDALONE
* :['A4988', 'A5984', 'DRV8825', 'LV8729', 'L6470', 'L6474', 'POWERSTEP01', 'TB6560', 'TB6600', 'TMC2100', 'TMC2130', 'TMC2130_STANDALONE', 'TMC2160', 'TMC2160_STANDALONE', 'TMC2208', 'TMC2208_STANDALONE', 'TMC2209', 'TMC2209_STANDALONE', 'TMC26X', 'TMC26X_STANDALONE', 'TMC2660', 'TMC2660_STANDALONE', 'TMC5130', 'TMC5130_STANDALONE', 'TMC5160', 'TMC5160_STANDALONE']
*/
#define X_DRIVER_TYPE TMC2209_STANDALONE
#define Y_DRIVER_TYPE TMC2209_STANDALONE
#define Z_DRIVER_TYPE TMC2209_STANDALONE
//#define X2_DRIVER_TYPE A4988
//#define Y2_DRIVER_TYPE A4988
//#define Z2_DRIVER_TYPE A4988
//#define Z3_DRIVER_TYPE A4988
//#define Z4_DRIVER_TYPE A4988
#define E0_DRIVER_TYPE TMC2209_STANDALONE
//#define E1_DRIVER_TYPE A4988
//#define E2_DRIVER_TYPE A4988
//#define E3_DRIVER_TYPE A4988
//#define E4_DRIVER_TYPE A4988
//#define E5_DRIVER_TYPE A4988
//#define E6_DRIVER_TYPE A4988
//#define E7_DRIVER_TYPE A4988
// Enable this feature if all enabled endstop pins are interrupt-capable.
// This will remove the need to poll the interrupt pins, saving many CPU cycles.
//#define ENDSTOP_INTERRUPTS_FEATURE
/**
* Endstop Noise Threshold
*
* Enable if your probe or endstops falsely trigger due to noise.
*
* - Higher values may affect repeatability or accuracy of some bed probes.
* - To fix noise install a 100nF ceramic capacitor in parallel with the switch.
* - This feature is not required for common micro-switches mounted on PCBs
* based on the Makerbot design, which already have the 100nF capacitor.
*
* :[2,3,4,5,6,7]
*/
//#define ENDSTOP_NOISE_THRESHOLD 2
// Check for stuck or disconnected endstops during homing moves.
//#define DETECT_BROKEN_ENDSTOP
//=============================================================================
//============================== Movement Settings ============================
//============================== Endstop Settings ===========================
//===========================================================================
// @section homing
// Specify here all the endstop connectors that are connected to any endstop or probe.
// Almost all printers will be using one per axis. Probes will use one or more of the
// extra connectors. Leave undefined any used for non-endstop and non-probe purposes.
// Укажите здесь все разъемы концевых упоров, которые подключены к любому концевому упору или датчику.
// Почти все принтеры будут использовать по одному на каждую ось. Зонды будут использовать один или несколько
// дополнительные разъемы. Оставьте неопределенным все, что используется для целей без остановки и без проверки.
//#define USE_XMIN_PLUG
//#define USE_YMIN_PLUG
#define USE_ZMIN_PLUG
#define USE_XMAX_PLUG
#define USE_YMAX_PLUG
//#define USE_ZMAX_PLUG
// Enable pullup for all endstops to prevent a floating state
#define ENDSTOPPULLUPS
#if DISABLED(ENDSTOPPULLUPS)
// Disable ENDSTOPPULLUPS to set pullups individually
//#define ENDSTOPPULLUP_XMAX
//#define ENDSTOPPULLUP_YMAX
//#define ENDSTOPPULLUP_ZMAX
//#define ENDSTOPPULLUP_XMIN
//#define ENDSTOPPULLUP_YMIN
//#define ENDSTOPPULLUP_ZMIN
//#define ENDSTOPPULLUP_ZMIN_PROBE
#endif
// Enable pulldown for all endstops to prevent a floating state
//#define ENDSTOPPULLDOWNS
#if DISABLED(ENDSTOPPULLDOWNS)
// Disable ENDSTOPPULLDOWNS to set pulldowns individually
//#define ENDSTOPPULLDOWN_XMAX
//#define ENDSTOPPULLDOWN_YMAX
//#define ENDSTOPPULLDOWN_ZMAX
//#define ENDSTOPPULLDOWN_XMIN
//#define ENDSTOPPULLDOWN_YMIN
//#define ENDSTOPPULLDOWN_ZMIN
//#define ENDSTOPPULLDOWN_ZMIN_PROBE
#endif
// Mechanical endstop with COM to ground and NC to Signal uses "false" here (most common setup).
#define X_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop.
#define Y_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop.
#define Z_MIN_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop.
#define X_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop.
#define Y_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop.
#define Z_MAX_ENDSTOP_INVERTING false // Set to true to invert the logic of the endstop.
#define Z_MIN_PROBE_ENDSTOP_INVERTING false // Set to true to invert the logic of the probe.
/**
* Stepper Drivers
*
* These settings allow Marlin to tune stepper driver timing and enable advanced options for
* stepper drivers that support them. You may also override timing options in Configuration_adv.h.
*
* A4988 is assumed for unspecified drivers.
*
* Use TMC2208/TMC2208_STANDALONE for TMC2225 drivers and TMC2209/TMC2209_STANDALONE for TMC2226 drivers.
*
* Options: A4988, A5984, DRV8825, LV8729, L6470, L6474, POWERSTEP01,
* TB6560, TB6600, TMC2100,
* TMC2130, TMC2130_STANDALONE, TMC2160, TMC2160_STANDALONE,
* TMC2208, TMC2208_STANDALONE, TMC2209, TMC2209_STANDALONE,
* TMC26X, TMC26X_STANDALONE, TMC2660, TMC2660_STANDALONE,
* TMC5130, TMC5130_STANDALONE, TMC5160, TMC5160_STANDALONE
* :['A4988', 'A5984', 'DRV8825', 'LV8729', 'L6470', 'L6474', 'POWERSTEP01', 'TB6560', 'TB6600', 'TMC2100', 'TMC2130', 'TMC2130_STANDALONE', 'TMC2160', 'TMC2160_STANDALONE', 'TMC2208', 'TMC2208_STANDALONE', 'TMC2209', 'TMC2209_STANDALONE', 'TMC26X', 'TMC26X_STANDALONE', 'TMC2660', 'TMC2660_STANDALONE', 'TMC5130', 'TMC5130_STANDALONE', 'TMC5160', 'TMC5160_STANDALONE']
*/
#define X_DRIVER_TYPE TMC2209_STANDALONE
#define Y_DRIVER_TYPE TMC2209_STANDALONE
#define Z_DRIVER_TYPE TMC2209_STANDALONE
//#define X2_DRIVER_TYPE A4988
//#define Y2_DRIVER_TYPE A4988
//#define Z2_DRIVER_TYPE A4988
//#define Z3_DRIVER_TYPE A4988
//#define Z4_DRIVER_TYPE A4988
#define E0_DRIVER_TYPE TMC2209_STANDALONE
//#define E1_DRIVER_TYPE A4988
//#define E2_DRIVER_TYPE A4988
//#define E3_DRIVER_TYPE A4988
//#define E4_DRIVER_TYPE A4988
//#define E5_DRIVER_TYPE A4988
//#define E6_DRIVER_TYPE A4988
//#define E7_DRIVER_TYPE A4988
// Enable this feature if all enabled endstop pins are interrupt-capable.
// This will remove the need to poll the interrupt pins, saving many CPU cycles.
//#define ENDSTOP_INTERRUPTS_FEATURE
/**
* Endstop Noise Threshold
*
* Enable if your probe or endstops falsely trigger due to noise.
*
* - Higher values may affect repeatability or accuracy of some bed probes.
* - To fix noise install a 100nF ceramic capacitor in parallel with the switch.
* - This feature is not required for common micro-switches mounted on PCBs
* based on the Makerbot design, which already have the 100nF capacitor.
*
* :[2,3,4,5,6,7]
*/
//#define ENDSTOP_NOISE_THRESHOLD 2
// Check for stuck or disconnected endstops during homing moves.
//#define DETECT_BROKEN_ENDSTOP
//=============================================================================
//============================== Movement Settings ============================


