Подробности и файлы для скачивания по ссылке на github`е


Примечания:
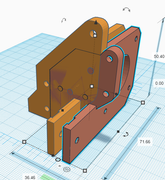
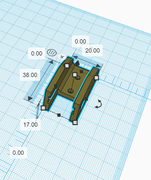
Создано на основе работ Дмитрия Соркина.
Моделирование проводилось в программе FreeCAD.
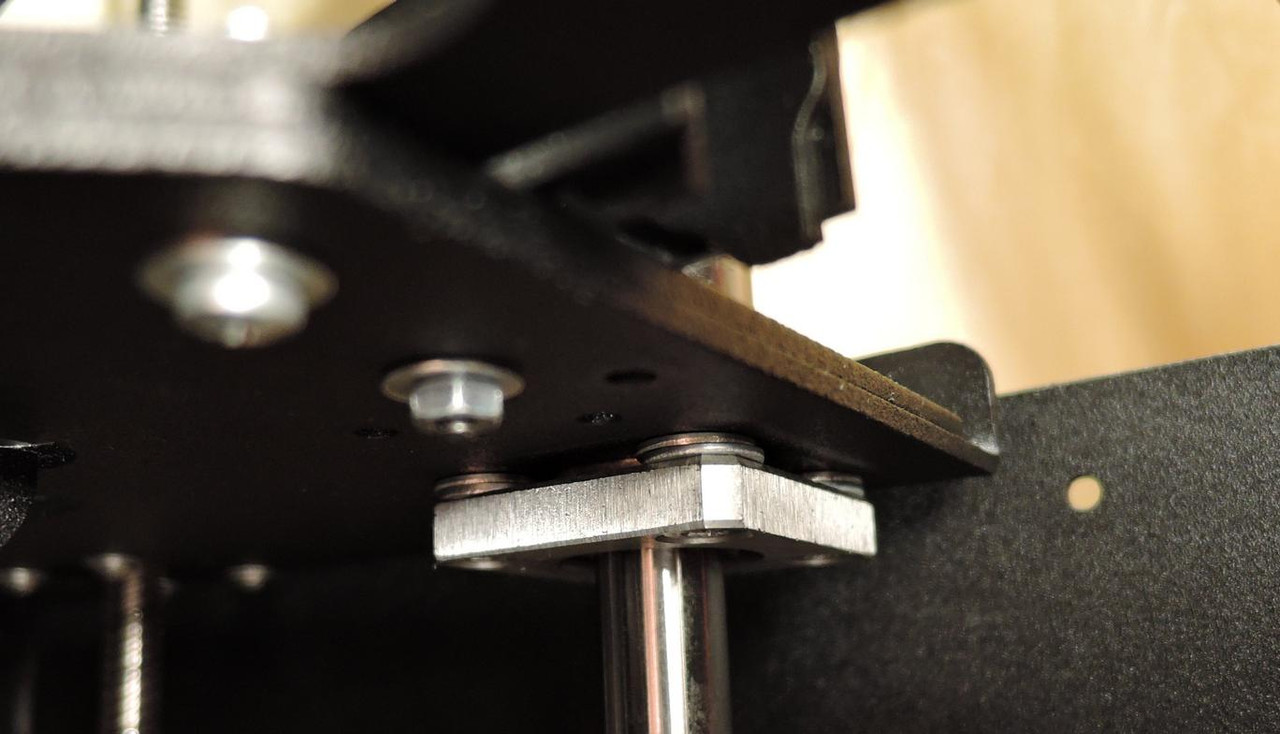
В сравнении со штатным металлическим креплением, толщина пластикового элемента, фиксирующегося на линейном подшипнике больше (примерно на 4мм). Это может привести к тому, что сопло не достанет до поверхности стола. При этом потребуется использовать винты 50 мм или поднять стол относительно подшипников LMK12LUU.
Моделирование проводилось в программе FreeCAD.
В сравнении со штатным металлическим креплением, толщина пластикового элемента, фиксирующегося на линейном подшипнике больше (примерно на 4мм). Это может привести к тому, что сопло не достанет до поверхности стола. При этом потребуется использовать винты 50 мм или поднять стол относительно подшипников LMK12LUU.
Устанавливаемые элементы:
Экструдер: BMG
Мотор: NEMA17
HOTEND: E3DV6
Ремень: GT-2 (6 мм)
Датчик уровня: BL-TOUCH / 3D-TOUCH. Площадка печатается отдельно и крепится винтами к основанию винтами М3.
Кабель-канал: 10 х 10 (мм)
Концевик оси X: без концевика (SensorLess Homing)
Вентилятор обдува: Улитка 5015
Вентилятор охлаждения: Осевой 3010 или 4010
Плата коммутации BLK
Мотор: NEMA17
HOTEND: E3DV6
Ремень: GT-2 (6 мм)
Датчик уровня: BL-TOUCH / 3D-TOUCH. Площадка печатается отдельно и крепится винтами к основанию винтами М3.
Кабель-канал: 10 х 10 (мм)
Концевик оси X: без концевика (SensorLess Homing)
Вентилятор обдува: Улитка 5015
Вентилятор охлаждения: Осевой 3010 или 4010
Плата коммутации BLK