Немного истории. Как-то, посмотрев обзор на сборку UNI на канале "Уголок технаря", раскритиковал его подход к сборке и подбору метизов в комментариях. На что в следующим видео получил привет и категоричное утверждение -..к сожалению как не пытался ... но с расположением ремня в два уровня получалось, только с уменьшением области печати!.
То ли "Крепежопы" меня задели, то ли я не поверил "Технарю", но за пол дня накидал модельку, даже 2 в одной, мысленно представляя механику.
Сказал А, нужно говорить Б...
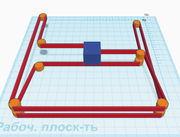
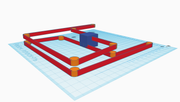
Разобрал H-bot, и начал собирать макет просто на винтах и шайбах, паралельно прикидывая куда и как прейдут ремни, как их крепить, как натягивать. Результатом стал вот такой вариант:
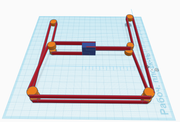
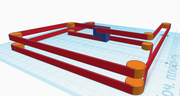
Ремни везде параллельны друг - другу, кроме двух участков, максимально удаленных от приводов. Нижний ремень проходит по траектории ремня в системе H-bot. Верхний ремень поднят над рамой оси Y на 22 мм (его нижний край) это примерно 0,5 мм над ребром жесткости балки оси Х. 22 как мне показалось, вообще магическая цифра в UNI... Что ж, ремни раскинули, теперь надо натянуть и закрепить. Очень понравился натяжитель, который нашел "Технарь". Но он, его не выложил в своих файлах, сам я его не нашел, а скачав похожие и более навороченные мысль ушла за горизонт... нужна была модель с креплением и натягом и что бы на нее свободно встал двигатель... я взял ту, что лежала напечатанной в наборе UNI.

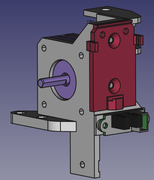
С целью упрощения печати модель базы и натяжителей была разделена и собиралась из 4 деталей.
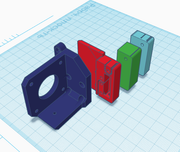
Красная деталь предполагалось как основа для различных вариантов, это просто платформа с отверстиями для крепления к каретке. Но натурные испытания показали, что у нее проблемы с жесткостью. Красную и синюю детали пришлось объединить, но идея заманчивая. Так же были допущены ошибки в местах крепления ремня, зубчатый фиксатор не в том направлении (снаружи, а необходим внутри). Нижний натяжитель был подогнан по отверстиям, а должен был быть развернут. Пробовал и натяжитель с проставкой соединять, но пока так и оставил 3 детали.
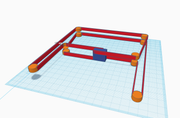
По сути вся система крепления и натяжения выглядит так:

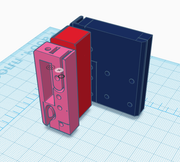
Это основа, на которую можно моделировать любой тип головы. Она кажется громоздкой и если найдется более элегантное решение, я не примену им воспользоваться. Почему именно этот вариант натяжителя был выбран? Дело в том, что необходимо было компактно разместить и натяжитель и мотор директ экструдера. У нижнего натяжителя больше свободы выбора но тут просто дань однообразию, да и длинна ремней одинаковая.
STL файлы для печати версии 1.0.






отпечатано на версии 0.9.
ИНСТРУКЦИЯ ПО СБОРКЕ.
1. Распечатать и подготовить все необходимые детали и инструмент.
2. Подготовить отверстия для крепления болтов DIN 912 М4 45-50 мм в раме портала.

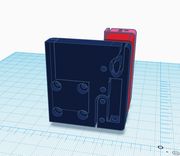
3. Собираем голову и натяжители.

НЕ ПРАВИЛЬНАЯ СБОРКА


ПРАВИЛЬНАЯ СБОРКА
4. Устанавливаем ролики и подшипники на балку оси Х. Что использовать выбирайте сами.

В напечатанные детали вкладываем гайки с капролоновым фиксатором.

и на самой балке должно выглядеть вот так:



5. Устанавливаем упорные подшипники на портал Y.
Скошенной стороной детали к ремням.



6. Меняем положение зубчатого шкива на правом моторе.
Шкив на правом моторе нужно перевернуть крепежным поясом вниз к мотору и закрепить на валу так, чтобы нижний край зубчатого паза находился на высоте 22 мм от поверхности портала оси Y.


7. Отмеряем и отрезаем ремни.
На собранную голову ставим первый ремень, крепим голову на пару винтов к каретки рельсы. Прокладываем один ремень, заводим в натяжитель без сильного натяга. Обрезаем. Снимаем ремень с головы, ровняем с целым куском и отрезаем.



8. Прокладываем ремни.
Первым делом закладываем ремни в натяжители. Потом, хоть на один болт крепим голову к каретке и протягиваем ремни. Дальше будет немного не удобно, но если что, можно скинуть ремни с фланцев на балек оси Х. Откручиваем голову от каретки и заводим ремни в натяжители, слегка поджимаем, что бы не выпали и прикручиваем голову уже капитально. Накидываем ремни обратно на подшипники, выбираем люфт и послабление на ремнях визуально по хвостикам из окошек натяжителя, а так же по собственным ощущениям.

9. Если до этого, Вы использовали систему H-bot, обязательно на самой плате поменяйте местами провода (выводы) моторов Х и Y. Иначе принтер будет печатать детали в зеркальном отображении. Ваш Core XY в два уровня без потери области печати готов.
Ну и немного видео работы. Прошу прощения за качество и шатание, снимал на телефон установленный на дочкину селфи палку.
https://www.youtube.com/watch?v=ZL_PVB5s3qw
Перед тем как снять видео, установил новые моторы на 24в в замен прежних 12ти вольтовых. Мдаа... лучше неуправляемые тихие 12в, чем управляемые крикуны.
По первым ощущениям переход на core XY был оправдан.
Есть замысел по жестче закрепить ролики и подшипники на балке Х. Возможно стоит перевернуть и поставить сверху правый мотор для верхнего ремня, ради полной посадки шкива на вал. Както перемоделировать крепление подшипников на портале оси Y. Возможны еще какие то слабые места. Главное ремень ни где не пересекается, не изгибается и как следствие не трется.
Алаверды "Технарю" - Скажи мне кто твой друг...
Обсуждайте, оценивайте, предлагайте и делитесь.
Дополнения фото, видео следуют...
Использование данного материал без ссылки на автора запрещаю.